RB3204-RBCX
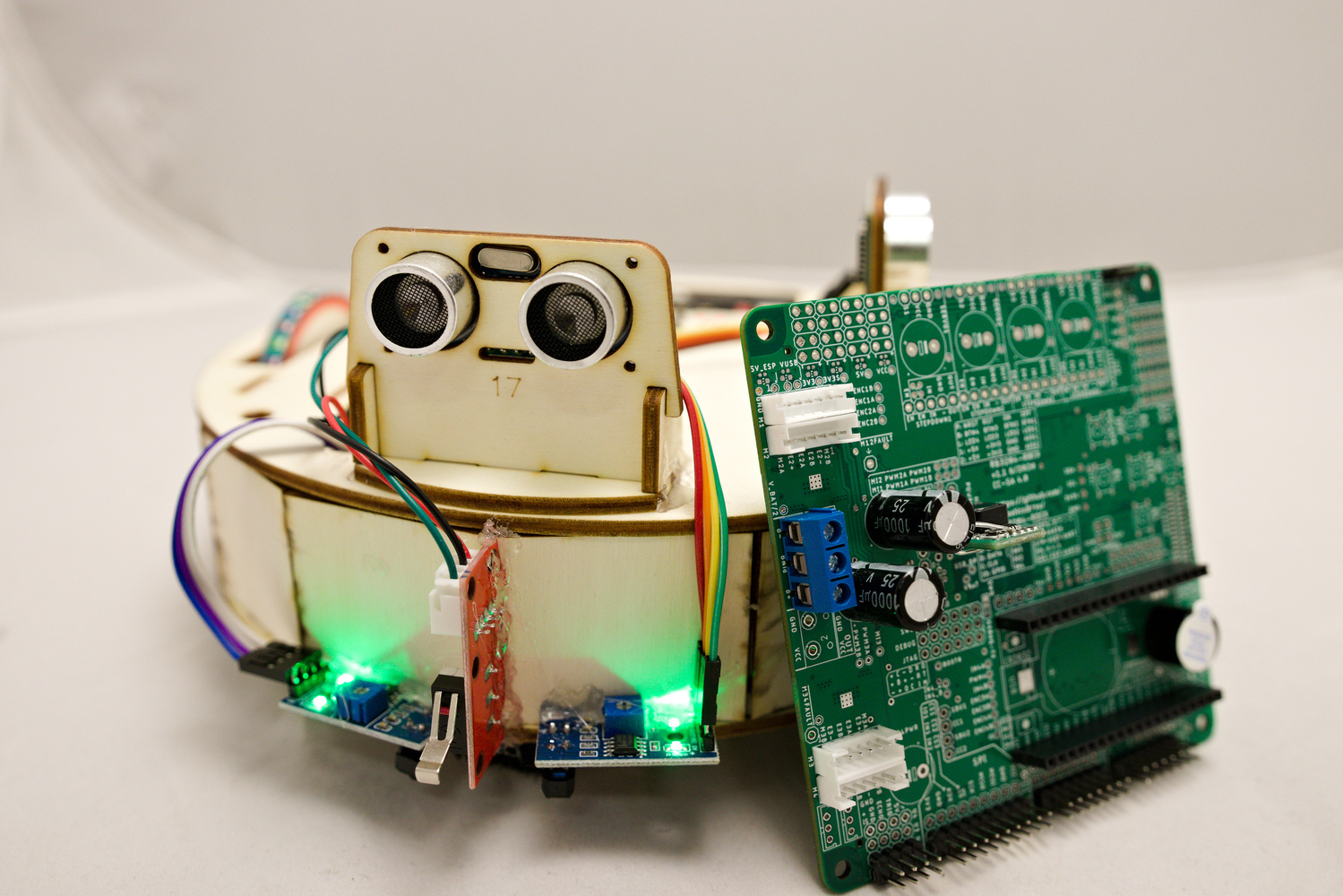
🔬 RBCX is a universal controller for hobby robots. It is a successor of RB3201-RBControl. It is used in our robot Robotka on Robo camp 2020.
Language:
C
Created:
01.03.2020
Updated:
02.03.2024
Stars:
7
Visit on GitHub
RB3204-RBCX
![]()



RBCX is a universal controller for hobby robots. It is a successor of RB3201-RBControl. It is used in our robot Robotka on Robo camp 2020.
Features
- ● 4 DC motors with encoders
- ● 4 servos with feedback (via ADC)
- ● 4 LEDs
- ● buttons with the gamepad interface
- ● Smart Servo connector
- ● piezo buzzer
- ● RTC
- ● ultra-sonic distance sensor connector
- ● I2C connectors
- ● OLED display connector
- ● accelerometer and gyroscope
- ● micro USB and USB-C connectors
- ● battery connector (without charging circuit)
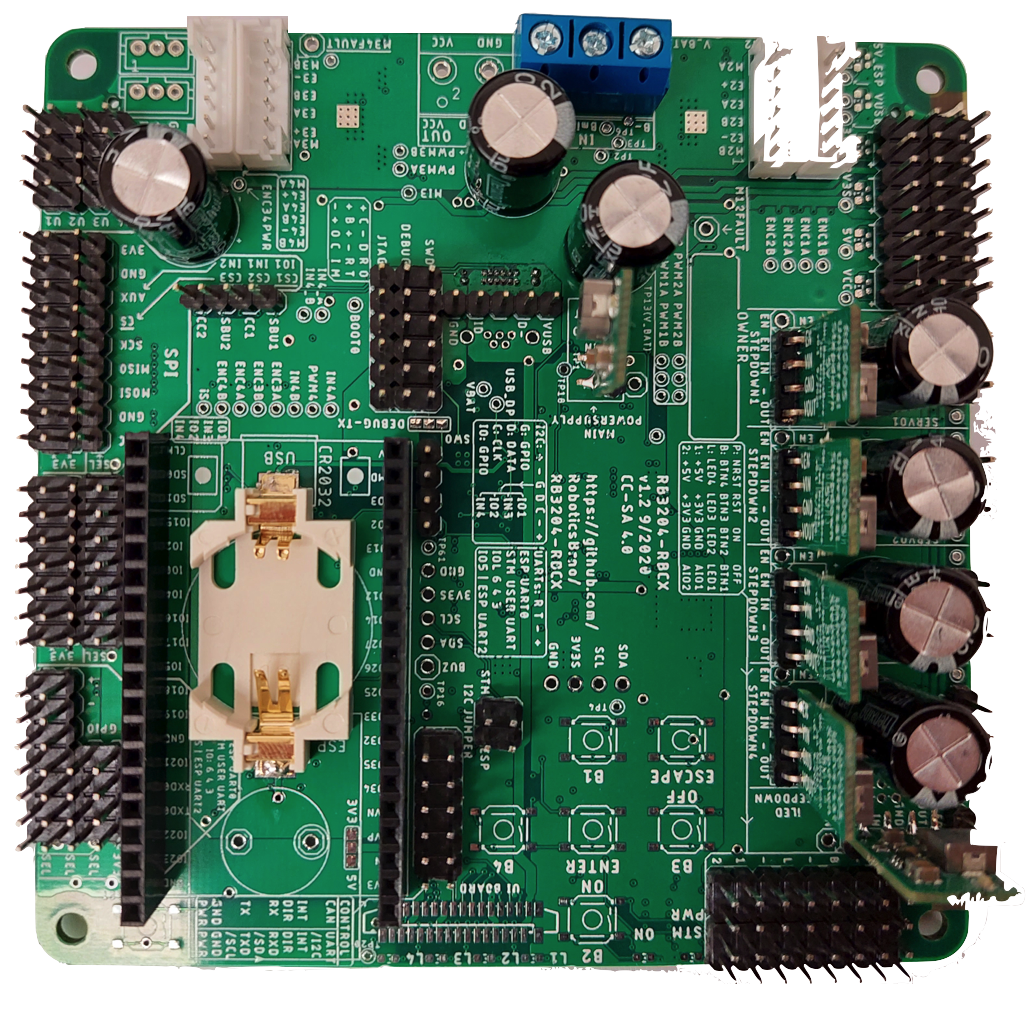
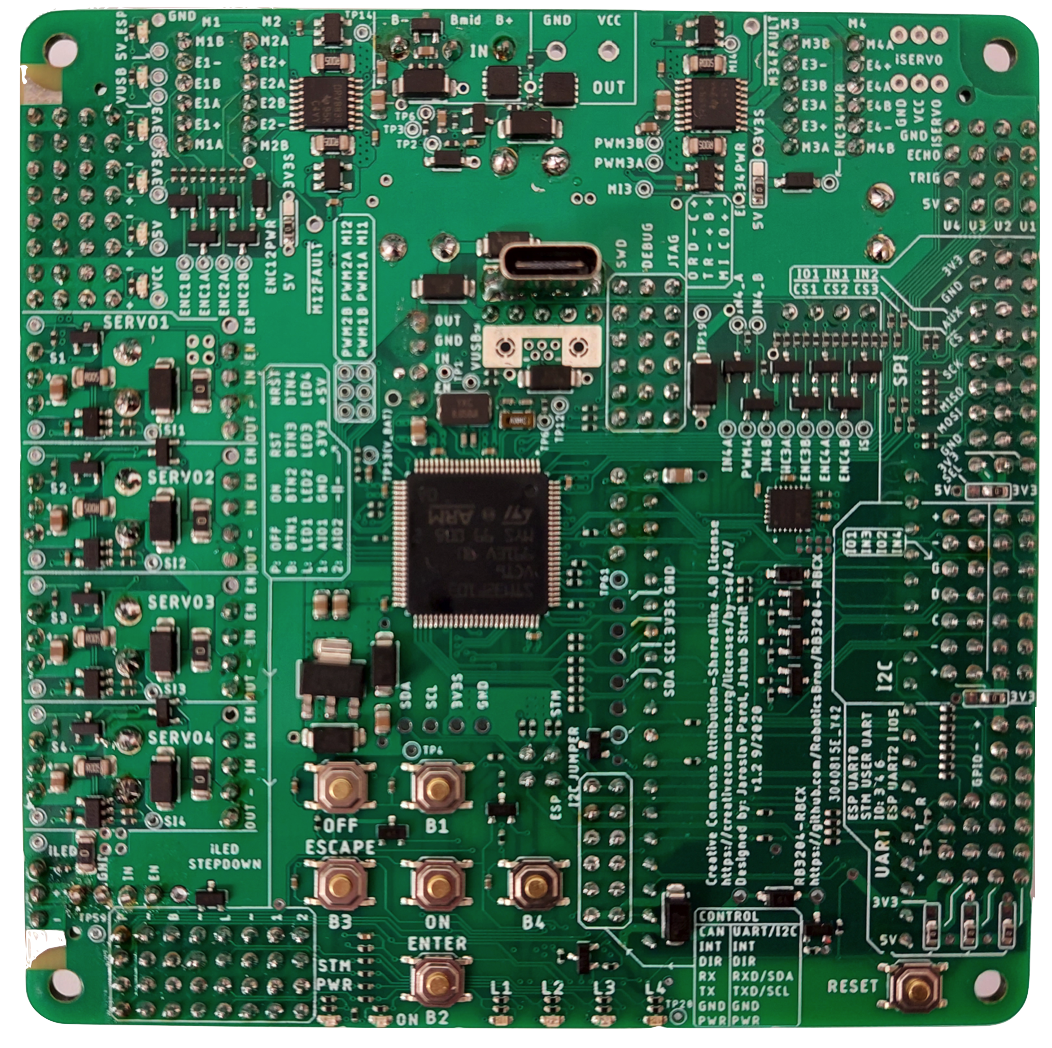
Hardware
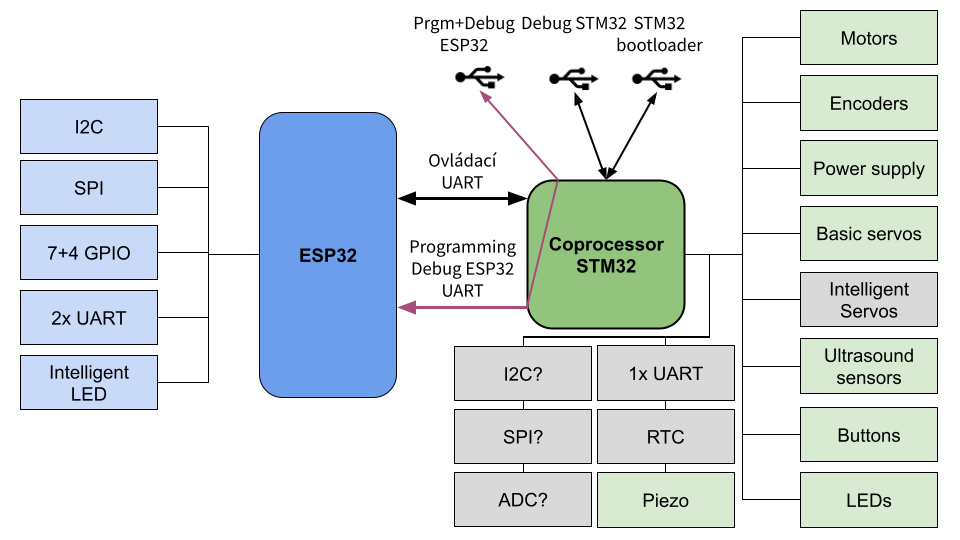
Board is based on STM32F103VC microcontroller and ESP32-DevKitC.
STM32 is used for motor control and other low-level tasks. ESP32 is used for high-level tasks like communication with mobile app and sending commands to STM32 via UART.
STM32F103VC
- ● 72 MHz, 32bit ARM Cortex-M3
- ● 48 KiB RAM, 256 KiB Flash
- ● 5x UART, USB
- ● Debug support (with ST-Link)
- ● Programmable in C++, with FreeRTOS and stm32cube framework, in Platform.io
- ● Our bootloader based on sboot_stm32.





